‘Chi si ferma è perduto’, pare sia questo quello che hanno pensato i vertici di SERRMAC, dal 1950 leader nella produzione di trapani e maschiatrici, quando hanno deciso di stipulare un accordo con la società Applyca srl, per lo sviluppo di nuovi prodotti e l’innovazione di quelli già esistenti.
Applyca srl di San Quirino, che progetta e realizza automazioni industriali customizzate, è il partner ideale per chi desidera migliorare l’efficienza dei processi produttivi all’interno della propria azienda, con un occhio ben attento a mantenere tempi ciclo contenuti, costi accessibili ed elevati standard di qualità.
Tali premesse non potevano che coinvolgere anche K.L.A.IN.robotics, in questo progetto per l’automazione delle operazioni di carico e scarico di una stazione di foratura e maschiatura di grandi lotti di produzione.
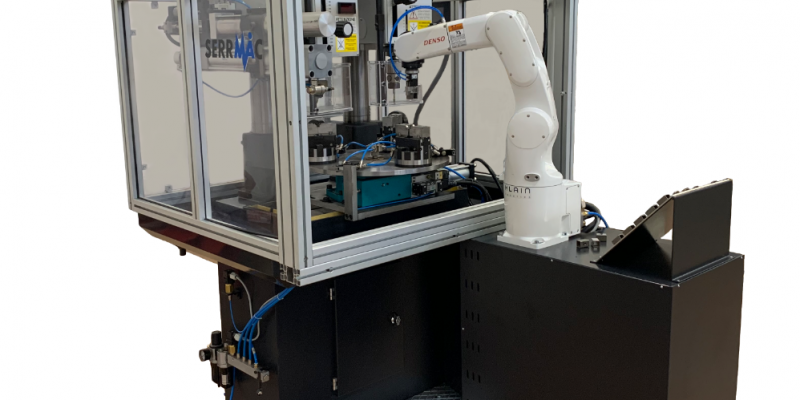
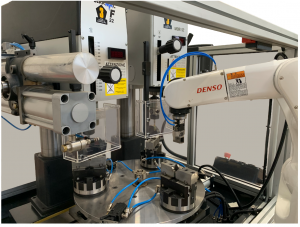
Per l’applicazione si è scelto di utilizzare uno dei robot antropomorfi della gamma DENSO, con sbraccio da 505 mm e portata al polso fino a 4 kg. Il modello VS050 è molto apprezzato per il design compatto, che lo rende particolarmente adatto in ambienti con spazi ridotti. Altro punto di forza del VS050 è la velocità, infatti le sue prestazioni consentono tempi ciclo davvero ridotti.
Cuore dell’applicazione robotica è una stazione di foratura denominata TMF, una macchina composta da due tipologie di teste, più nel dettaglio una di foratura e una di maschiatura, che lavora sfruttando l’innovativa tecnologia “Flow Drill”. Questa particolare tecnologia di foratura non necessita dell’asportazione del truciolo, ovvero il residuo di materiale che si ottiene a seguito di una lavorazione, perché semplicemente deforma il metallo, attraverso una temperatura sufficientemente alta e una velocità di rotazione elevata. Tale tecnologia consente quindi di rinforzare la parete dei fori e di effettuare delle filettature molto resistenti anche su spessori che possono essere considerati sottili.
È una tavola rotante a comporre la stazione di lavoro, che ruota ogni volta di 120°, e prevede tre differenti meccanismi, uno di foratura, uno di maschiatura (eseguiti, questi, dalla stazione TMF) e uno di caricamento delle morse (eseguito dal robot VS050). Il ciclo di lavoro prevede il caricamento della prima morsa da parte del robot che, attraverso la tavola ruotante, viene portata alla stazione di foratura, prima, e di maschiatura poi, mentre il robot procede con il caricamento di altre morse che seguiranno gli stessi passaggi di foratura e di maschiatura. Il pezzo finito viene infine scaricato dal robot per essere sostituito con quello nuovo e permettere quindi la continuazione del ciclo in modo automatico.
Sergio de Clara, Managing Director di Applyca srl, ha dichiarato: “Questa macchina è la chiara dimostrazione che da un attento studio e un accurato sviluppo si possono creare soluzioni veramente migliorative per ogni tipo di processo all’interno di un azienda che abbia voglia di sperimentare e scoprire che, con investimenti anche poco onerosi, si possono ottenere grandi risultati”.
Le forze sinergiche che ogni volta coinvolgono le realtà del nostro territorio portano sempre a notevoli vantaggi, nel segno dell’innovazione e dello sviluppo tecnologico, e la collaborazione nata tra Applyca – Serrmac e K.L.A.IN.robotics ne è un chiaro esempio.

 che la produzione sia puntuale, flessibile e di alta qualità. Per riuscire nell’impresa, i produttori devono usare le proprie risorse in modo efficiente e progettare processi operativi affidabili che supportino la loro produzione. I robot mobili autonomi (AMR) come quelli della Mobile Industrial Robots vengono spesso utilizzati proprio per questo fine, siccome questa tecnologia, dinamica e flessibile, consente alle compagnie di automatizzare il proprio trasporto interno di materiale in modo semplice.
che la produzione sia puntuale, flessibile e di alta qualità. Per riuscire nell’impresa, i produttori devono usare le proprie risorse in modo efficiente e progettare processi operativi affidabili che supportino la loro produzione. I robot mobili autonomi (AMR) come quelli della Mobile Industrial Robots vengono spesso utilizzati proprio per questo fine, siccome questa tecnologia, dinamica e flessibile, consente alle compagnie di automatizzare il proprio trasporto interno di materiale in modo semplice.


